Final Test Flight
An autonomous flight system built around NVIDIA’s Jetson Nano running YOLOv3 for real-time object detection and navigation.
Project Overview
During my time at the University of Minnesota Duluth, I built an autonomous octocopter that combined embedded AI with flight control systems. The goal was to create a drone capable of autonomous navigation using real-time computer vision.
Hardware Architecture
Core Components
Flight Platform
- Custom octocopter frame (8 motors for stability and redundancy)
- Pixhawk/iX4 autopilot flight controller
- GPS module for position tracking
- Electronic Speed Controllers (ESCs) for motor control
AI Computing
- NVIDIA Jetson Nano: The brain of the operation
- 128-core Maxwell GPU for YOLOv3 inference
- Quad-core ARM A57 CPU
- 4GB LPDDR4 memory
- Power consumption optimized for battery operation
Sensors & Connectivity
- USB camera for computer vision input
- Telemetry radio for ground station communication
- Battery monitoring system
Hardware Integration Photos
 Bottom view showing the NVIDIA Jetson Nano mounted on the octocopter frame with the Pixhawk flight controller, GoPro camera, and power distribution system
Bottom view showing the NVIDIA Jetson Nano mounted on the octocopter frame with the Pixhawk flight controller, GoPro camera, and power distribution system
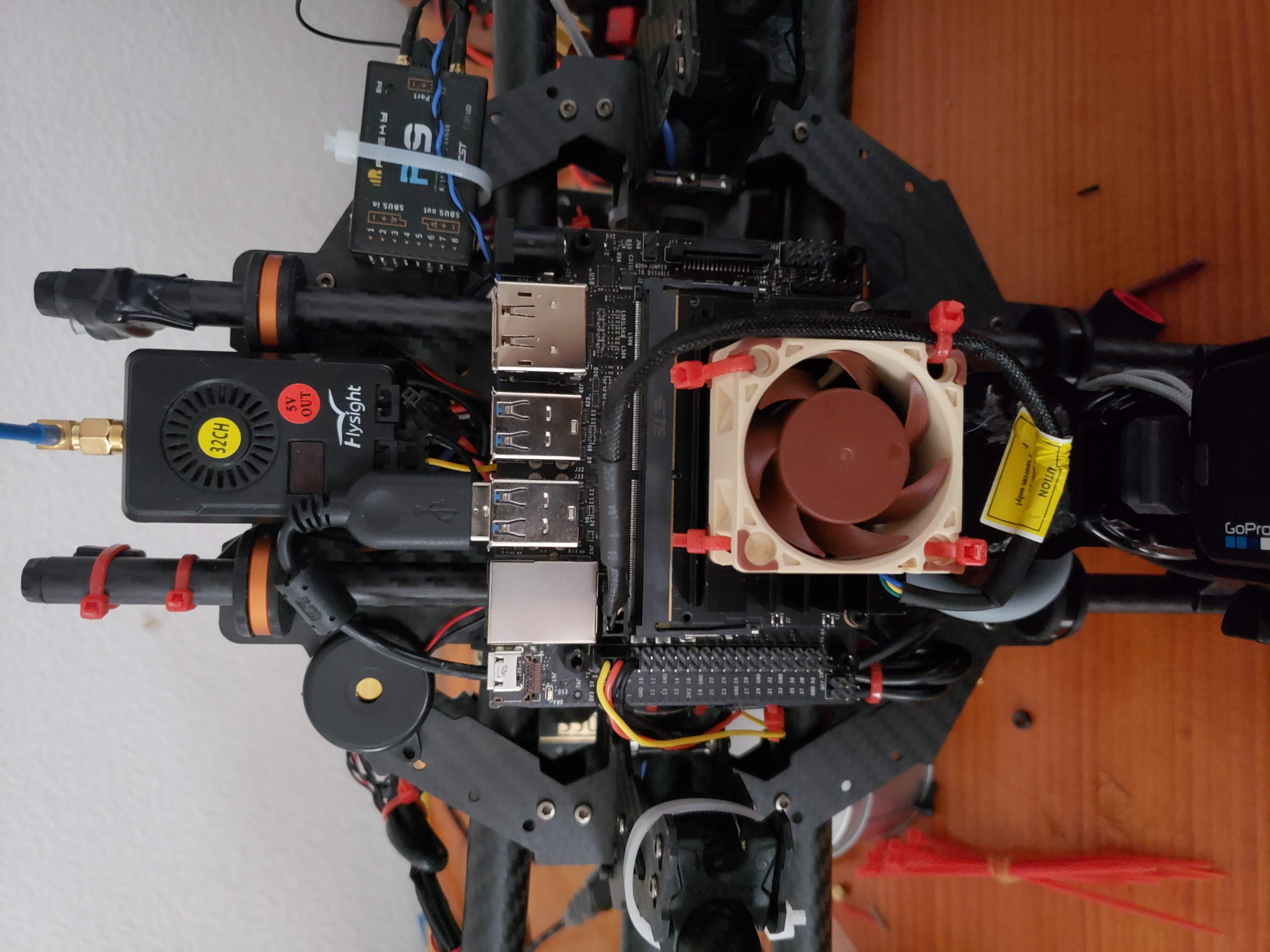 Close-up of the Jetson Nano with custom cooling fan, showing the USB ports, GPIO header, and power connections
Close-up of the Jetson Nano with custom cooling fan, showing the USB ports, GPIO header, and power connections
Integration Challenges
Integrating the Jetson Nano with the flight controller required:
- Custom power distribution to provide clean 5V to the Jetson
- UART/MAVLink communication between Jetson and Pixhawk
- Weight optimization (every gram counts in flight time)
- Vibration isolation for the camera
YOLOv3 Real-Time Object Detection
Why YOLOv3?
YOLOv3 (You Only Look Once) was chosen for its balance of accuracy and speed - critical for real-time autonomous navigation:
- Single-pass detection (vs. region proposal methods)
- ~30 FPS on Jetson Nano with optimized models
- Multi-scale prediction for objects at various distances
Implementation Details
Model Optimization
- Used TensorRT to optimize YOLOv3 for Jetson’s GPU
- Reduced model precision (FP16) while maintaining accuracy
- Custom training on aerial imagery dataset
- Focused on detecting: people, vehicles, obstacles, landing markers
Real-Time Pipeline
- Capture frame from camera
- Preprocess and resize (416x416)
- Run YOLOv3 inference on GPU
- Parse detections and compute bounding boxes
- Send navigation commands to flight controller
Autonomous Navigation
The system operated in several modes:
Object Tracking Mode
- Lock onto and follow detected objects
- Maintain safe distance using depth estimation
- Automatic obstacle avoidance
Waypoint Navigation
- GPS-based waypoint following
- Object detection for dynamic obstacle avoidance
- Return-to-home on low battery or signal loss
Landing Assistance
- Visual marker detection for precision landing
- Automatic descent when safe landing zone detected
Results & Performance
 Field testing in winter conditions - the octocopter proved reliable even in cold weather and challenging lighting conditions
Field testing in winter conditions - the octocopter proved reliable even in cold weather and challenging lighting conditions
What Worked
Flight Stability
- Octocopter configuration provided excellent stability
- Motor redundancy allowed continued flight with single motor failure
- Smooth integration between vision system and flight controller
Detection Performance
- Consistent 25-30 FPS for object detection
- Reliable detection at ranges of 5-50 meters
- Low false positive rate after model fine-tuning
Autonomous Behavior
- Successfully demonstrated autonomous takeoff, navigation, and landing
- Real-time obstacle detection and avoidance
- Stable tracking of moving objects
Limitations
Power Constraints
- Jetson Nano added significant power draw
- Flight time reduced to ~12 minutes (vs. ~18 without AI payload)
- Battery weight trade-offs
Processing Latency
- End-to-end latency of ~100ms (camera → decision → actuation)
- Acceptable for many tasks, but challenging at high speeds
Weather Sensitivity
- Computer vision performance degraded in poor lighting
- Rain and fog significantly impacted detection reliability
Technical Lessons Learned
Embedded AI Optimization
- TensorRT optimization was crucial for real-time performance
- FP16 precision provided best speed/accuracy trade-off
- Model quantization and pruning techniques extended battery life
Hardware Integration
- Power filtering is critical - motor noise can crash the Jetson
- Vibration isolation matters more than expected for vision
- UART communication needs proper flow control for reliability
Autonomous Systems
- Multiple redundant safety systems are non-negotiable
- Failsafe behaviors need extensive testing
- Always test with GPS spoofing and signal loss scenarios
Future Improvements
If I were to rebuild this system today, I would:
Hardware Upgrades
- Jetson Xavier NX or Orin Nano (better performance per watt)
- Stereo camera for depth perception
- LiDAR for all-weather obstacle detection
Software Enhancements
- Newer YOLO versions (YOLOv8/YOLOv9) for better efficiency
- Visual-inertial odometry (VIO) for GPS-denied navigation
- Reinforcement learning for more sophisticated flight behaviors
Safety Features
- Parachute deployment system
- Geofencing with multiple boundary layers
- Computer vision-based landing zone assessment
Conclusion
This project was an excellent introduction to autonomous robotics, combining:
- Embedded systems engineering
- Real-time computer vision
- Flight control systems
- AI model optimization
The experience of getting AI running efficiently on embedded hardware while meeting the strict timing requirements of autonomous flight taught valuable lessons about system integration and real-world constraints.
While commercial solutions have since surpassed this custom build, the hands-on experience of building an autonomous system from scratch provided insights that aren’t available from using off-the-shelf solutions.
Technical Stack
- Flight Controller: Pixhawk/iX4 Autopilot
- AI Platform: NVIDIA Jetson Nano
- Computer Vision: YOLOv3 + OpenCV
- Optimization: TensorRT, CUDA
- Communication: MAVLink protocol
- Development: Python, C++
- Ground Station: QGroundControl
This project was completed in 2018 as part of my studies at the University of Minnesota Duluth.